Komplette 6D-Vermessung eines Greifers/Bauteils unter 60 Sekunden
Dauerhaft in die Zelle integriert und über Roboterprogramm gesteuert
Automatische Übernahme der Korrekturwerte
Ermöglicht Greifervermessung ohne Messspitzen oder sonstige Hillfsmittel
Datenkommunikation wahlweise über Profinet, Profibus, Ethernet oder RS232

Schnelle und effiziente Wiederherstellung der Greiferpositionen an allen Stationen

Kalibriergenauigkeit weniger als 0,2 mm

Gesamte Fehlerkette vom Flansch bis zum Bauteil wird in einem Schritt erfasst

Korrektur des TCPs (in 6 Dimensionen) in der Robotersteuerung

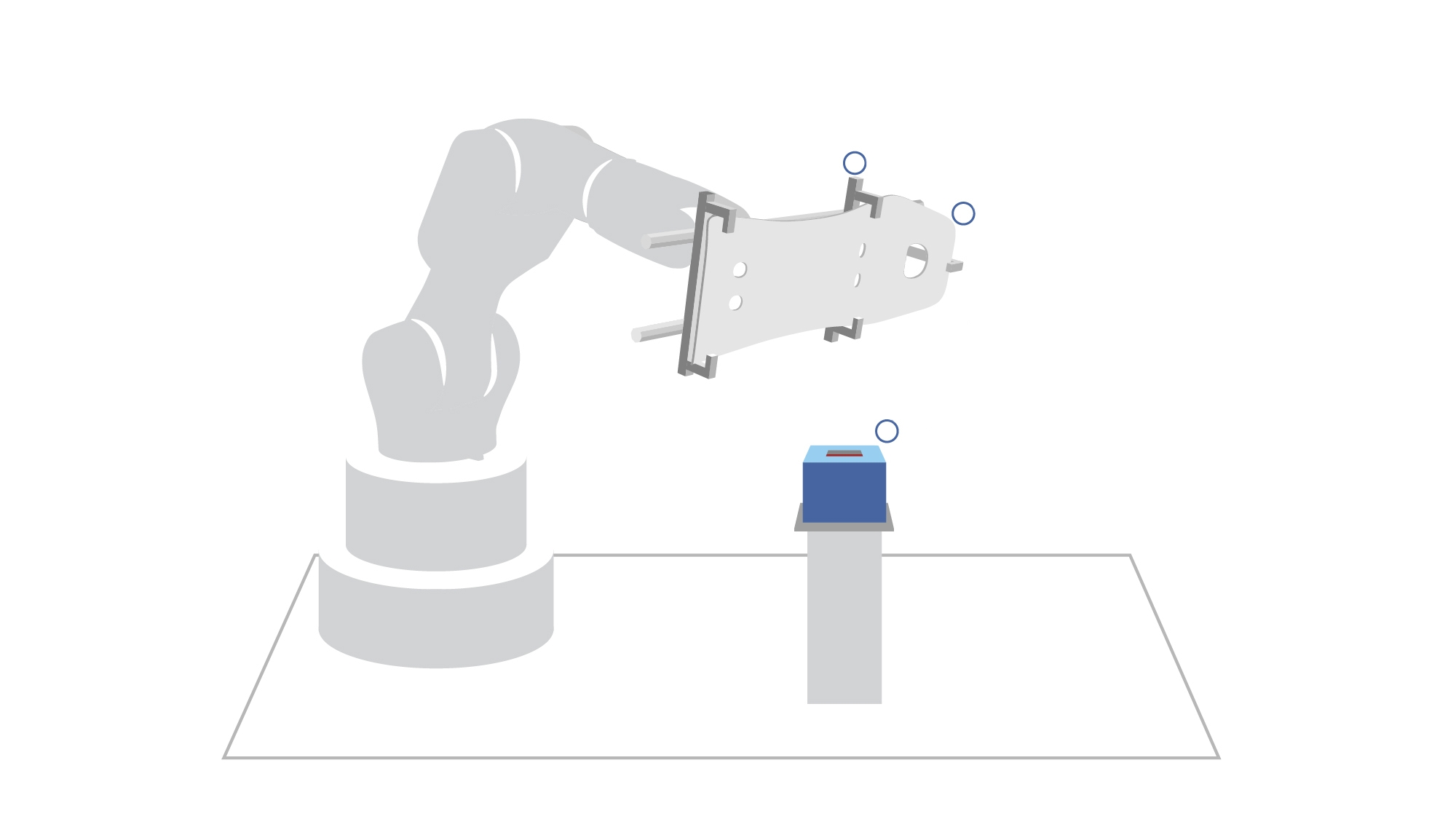
Ausgangslage
Die erstmalige Inbetriebnahme von GripLAB nach Montage in der Roboterzelle umfasst ein einfaches Bewegungsprogramm mit neun Messpunkten.
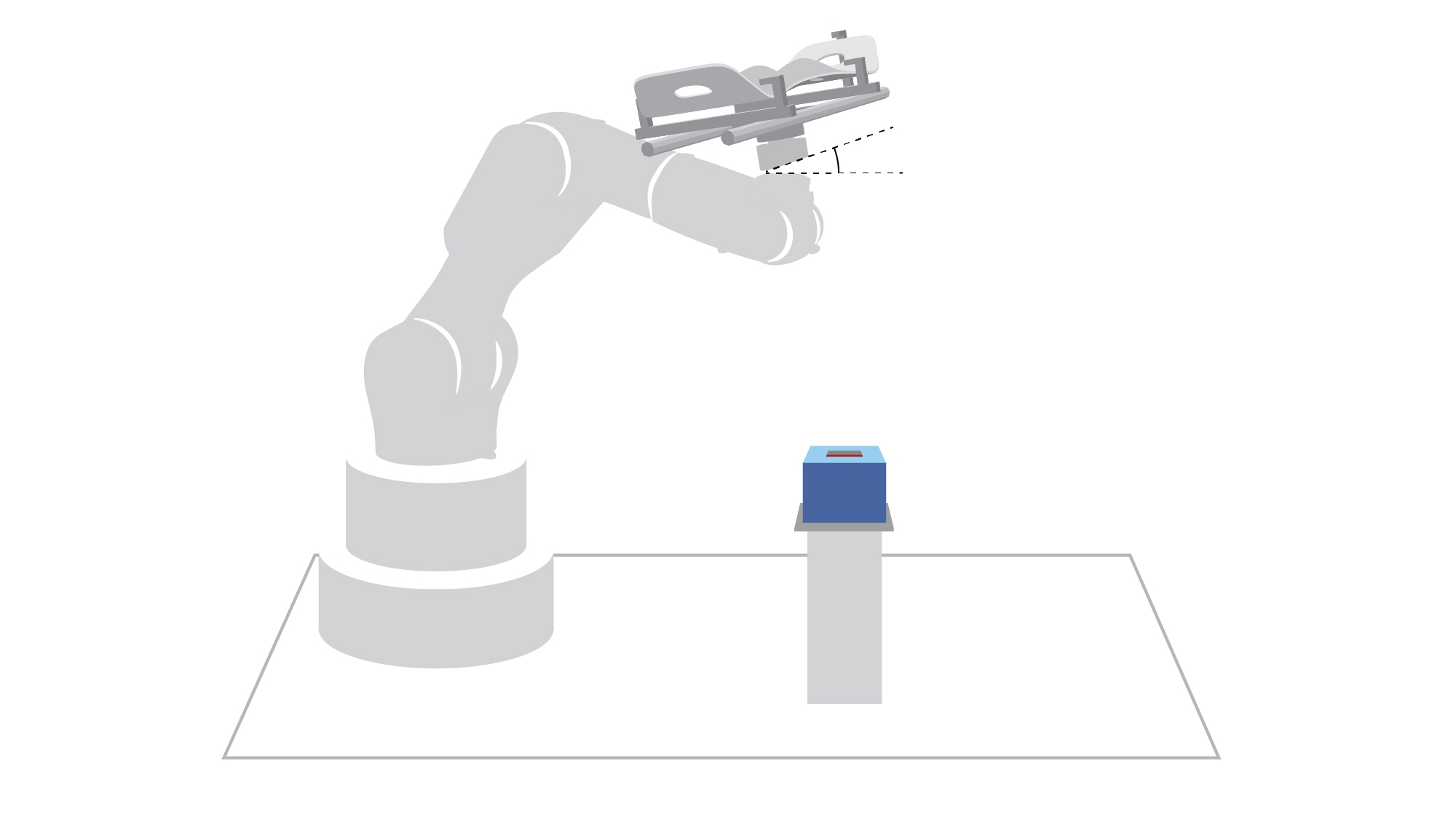
Prüfung
Nach einem Crash zeigt die Prüfung, dass der Greifer verstellt ist. Eine zusätzliche Softwareinstallation auf der Robotersteuerung ist nicht erforderlich.
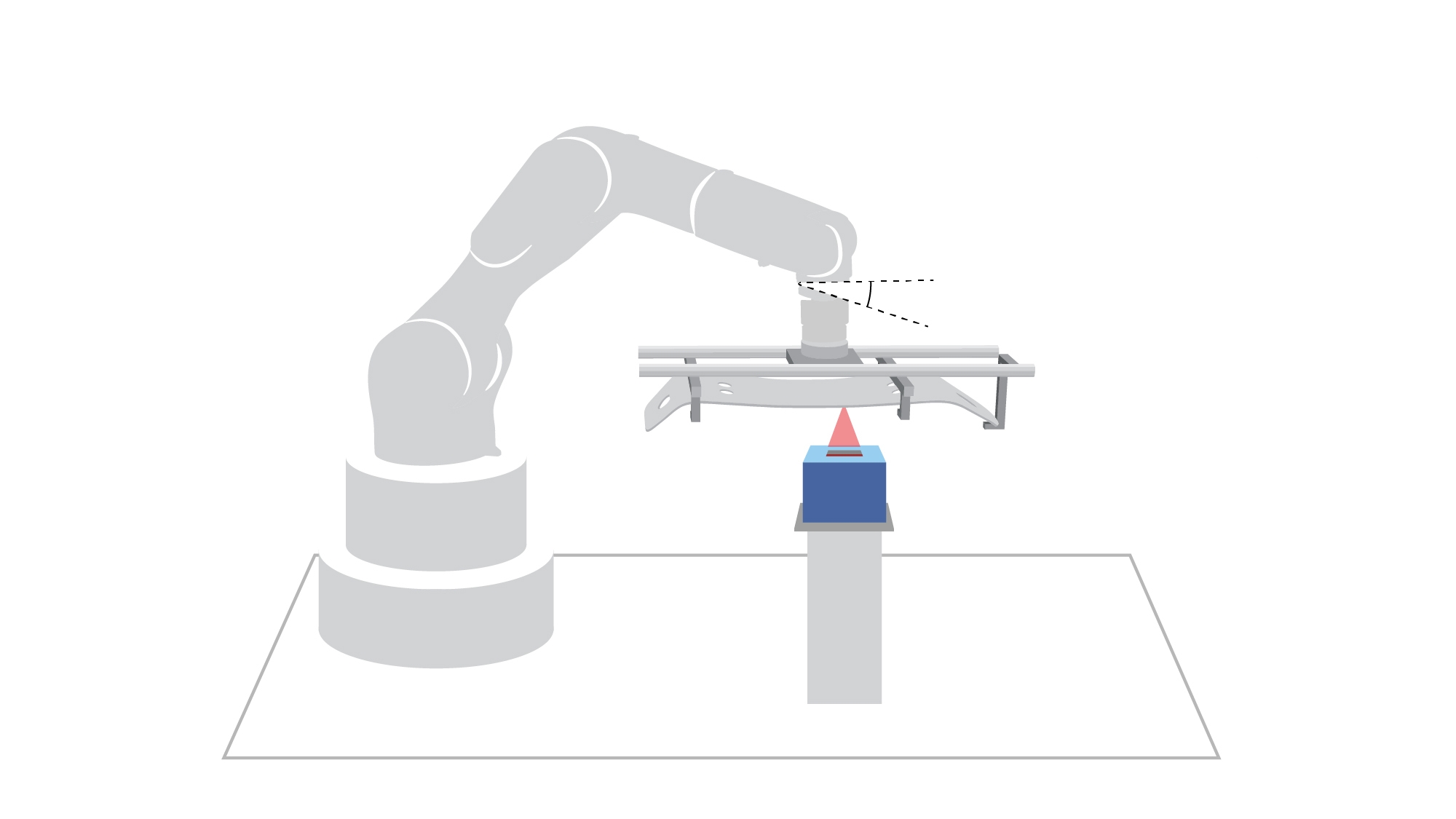
Vermessung
Die automatische Vermessung des Greifers erfolgt durch Abfahren des Bewegungsprograms.
Kalibrierung
Kalibrierung des gegriffenen Bauteils. Nach automatischem Übertragen der korrigierten Tooldaten ist der Greifprozess wieder präzise.